旋铆机的驱动方式有哪些?旋铆机的种类有哪些?
来源:原创
|
作者:harmonroll
|
发布时间: 2022-06-24
|
3285 次浏览
|
🔊 点击朗读正文
❚❚
▶
|
分享到:
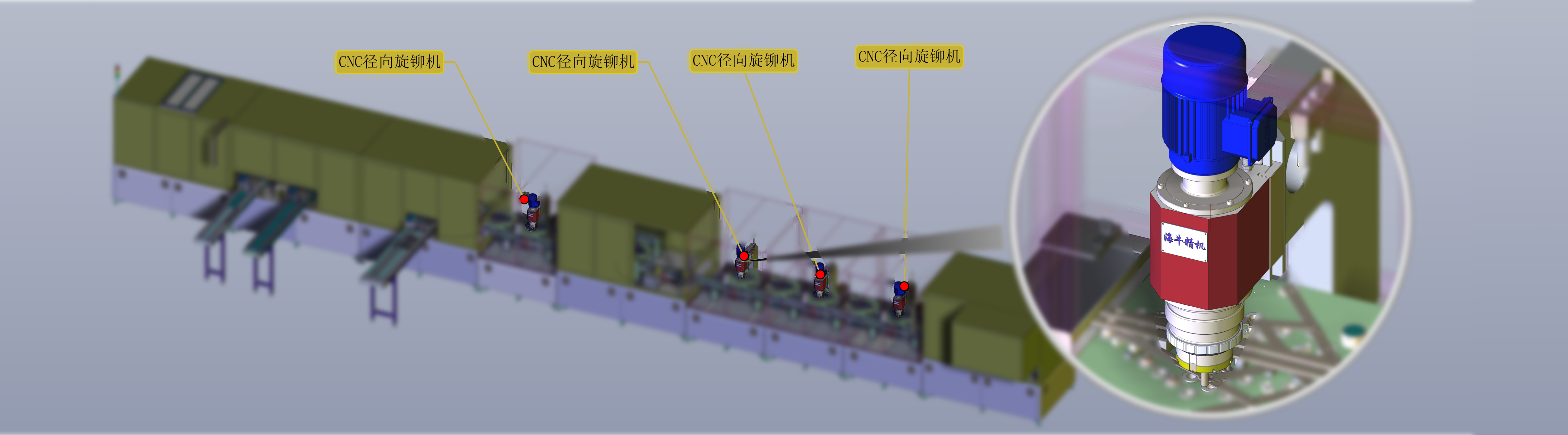
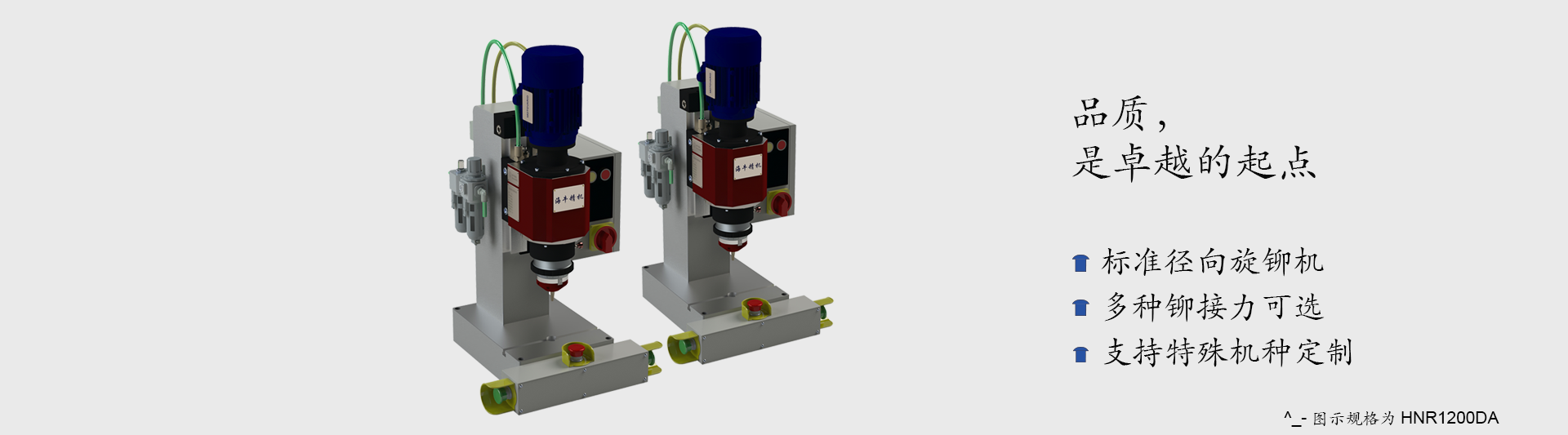
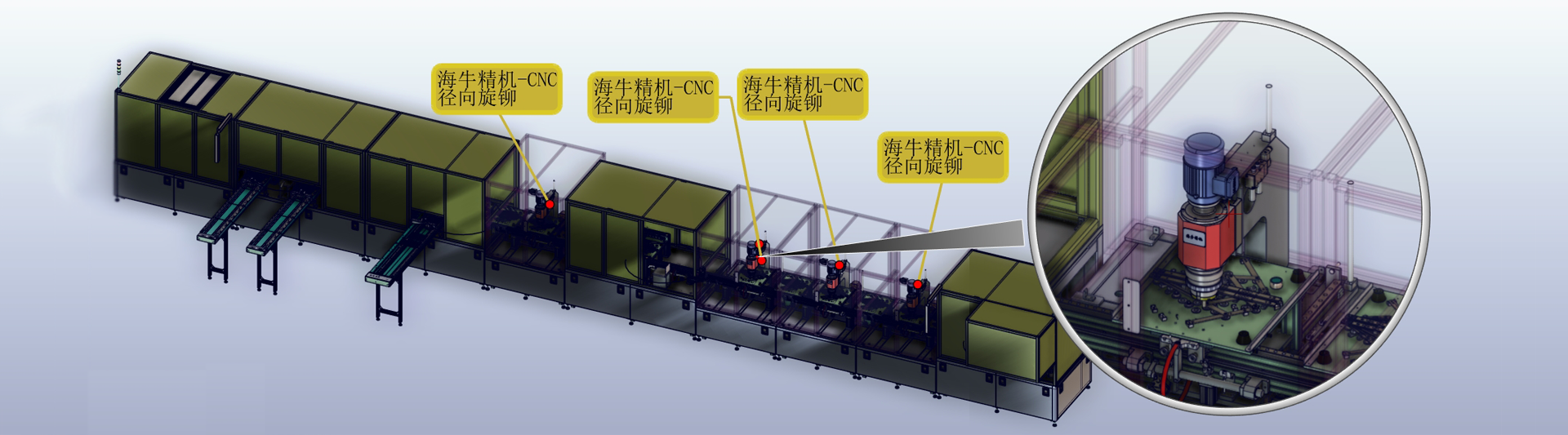
今天讨论旋铆机驱动方式,即运动动力来源。现有旋铆机运动主要有铆头回转和往复直线两部分,回转运动多由电机驱动,主要探讨往复直线运动的驱动方式:一是压缩空气驱动的气动旋铆机,输出力受气源压力影响,我司兼顾外形采用特殊活塞设计,现有气压径向旋铆机最大铆接力约1.7吨,可铆接12mm钢制铆钉,也可为客户定制最大约3.3吨铆接力、可铆接16mm钢制铆钉的机型,体积略大;二是液压驱动的液压旋铆机,工作介质为液压油,油压压力选择性广,铆接力范围宽,我司国产液压油压旋铆机最大铆接力为6吨,可铆接20mm左右钢制铆钉,也可为客户定制10吨以上重型液压径向旋铆机;三是电驱动的伺服旋铆机,往复运动由伺服电机驱动,旋转运动可为伺服或普通电机,控制精度取决于滚珠丝杆或位移光栅尺精度,我司现有精度±0.02的无需配置位移传感器,精度±0.01的会增加位移传感器或位移光栅尺辅助监测,其显著特点是可控制任意铆接行程及速度,搭配传感器可提高铆接一致性,减少铆钉高度影响。适合的才是最好的,气动和液压旋铆机铆接力够时铆接精度相同,以上以我司产品为例解析,谨慎参考
今天我们来讨论下旋铆机的驱动方式,即旋铆机运动动力的来源有哪些
首先,再现有的旋铆机当中,无论是径向旋铆机还是摆碾旋铆机,其运动主要有两部分,第一,铆头的回转运动;第二,铆头的往复直线运动;其中铆头的回转运动主要有电机驱动,所以我们今天主要来探讨铆头的往复直线运动,主要有以下几种方式驱动:

第一种,压缩空气驱动,即气动旋铆机,气动旋铆机受气源压力的影响(压力一般在0.2~1MPa之前),输出力是有限制的,以我司为例,在兼顾外形的情况下,采用特殊活塞设计,现有的气压径向旋铆机的铆接力最大在1.7吨左右(气压在0.6MPa时),可铆接12mm的钢制铆钉,对于气动旋铆机来说,这已经是重载气动旋铆机的了,当然,我司也会为客户定制更大输出力的气动旋铆机,最大的铆接力约在3.3吨左右,可铆接16mm的钢制铆钉,此时缸的外径约在230左右,体积略大。
第二种,液压驱动,也就是我们常说的液压旋铆机,液压旋铆机与气动旋铆机的最大不同之处在于工作介质是液压油;常用液压油主要有32号和46号,这里主要是粘度不同,中高压最好用粘度大的,其中,油压压力有低压、中压、高压等,选择性非常的广,这样,铆接力相对而言就会宽一些,我司现有国产液压油压旋铆机当中,铆接力最大为6吨,可铆接20mm左右的钢制铆钉,当然,我们也会为客户定制10吨以上的重型液压径向旋铆机。

第三种驱动方式那就是电了,也就是伺服旋铆机,往复运动由伺服电机驱动,旋转运动可为伺服电机,也可为其他普通电机,如简图所示,整个回转运动模块安装在滚珠丝杆上,然后由伺服电机带动滚珠丝杆,实现往复直线运动,这种控制的精度取决于滚珠丝杆的精度,或者位移光栅尺的精度,我司现有伺服旋铆机当中,精度在±0.02的,无需配置位移传感器,直接由伺服电机驱动即可,精度在±0.01的,一般会增加一组位移传感器,或者位移光栅尺作为辅助监测,保证铆接质量。伺服旋铆机的显著特点是可以控制任意铆接行程及铆接速度,这样,如果再搭配一些传感器,检测铆钉、工件等高度,然后反馈给伺服电机,可大大提高铆接的一致性,减少铆钉高度对铆接的影响,这对一些回转体尤为重要。
小计:适合的才是最好的,对于气动和液压的旋铆机,只要铆接力够,铆接精度都是一样的,
以上皆以我司产品为例解析,请谨慎参考!!原创作品,转载请注明出处